
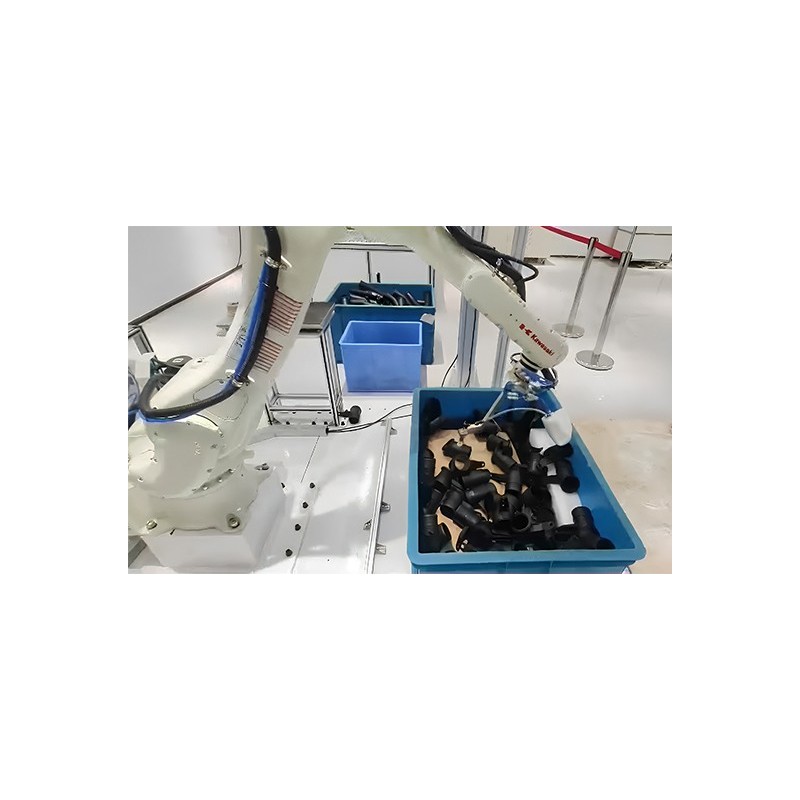






项目概述:
胶管无序摆放在料框中,3D视觉对工件进行识别和ding位,引导机器人实现对胶管的无序抓取并上料,用机械臂替代人工,抓取精度±0.25mm,可24小时稳定运行。

技术难点:
1、工件是纯黑色的,对相机点云成像有较大的影响;
2、精度要求较高,精度要求±0.25mm;
3、来料状态无序,需二次定wei;
4、单个机器人负责两个工位的工件上下料。
解决方案:
1、采用多次曝光点云叠加方式保证工件点云质量;
2、采用自研高精度3D视觉定wei算法,工件定wei精度±0.25mm;
3、采用深度学习和硬件加速算法,提高节拍;
4、可适应多款工件同时生产的场景。
采用机器人、3D视觉系统和AI算法相结合的方案,可以让机器人以更准确和稳定的方式进行物料搬运,大大提高生产效率。利用3D视觉引导技术可以实现对物品进行精准辨识和定wei,从而帮助机器人快速准确地抓取物品,并将其放置在指ding位置,实现对工件的自动分拣和上下料。











